


Harjadeta servomootorite töö põhiteooria keerleb magnetismi põhimõtete ümber, kus sarnased poolused tõrjuvad ja vastaspoolused tõmbavad. Servomootoris on kaks magnetallikat: püsimagnetid, mis asuvad tavaliselt mootori rootoril, ja statsionaarne elektromagnet, mis ümbritseb rootorit. Elektromagnetit nimetatakse kas staatori- või mootorimähiseks ja see koosneb terasplaatidest, mida nimetatakse lamineerimiseks ja mis on omavahel ühendatud. Terasplaatidel on tavaliselt "hambad", mis võimaldavad nende ümber kerida vasktraadi.
Tulles tagasi magnetismi põhimõtete juurde, kui juht nagu vasktraat moodustatakse mähiseks ja juht on pingestatud nii, et vool läbib seda, tekib magnetväli.
Sellel juhti läbiva voolu tekitatud magnetväljal on põhjapoolus ja lõunapoolus. Kui magnetpoolused asuvad staatoril (kui see on pinge all) ja rootori püsimagnetitel, kuidas luua olukord, kus vastaspoolused tõmbavad külge ja nagu poolused tõrjuvad?
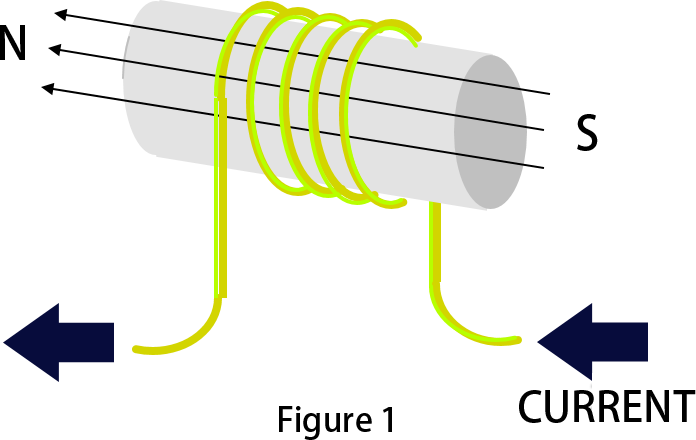
Peamine on pöörata elektromagneti läbivat voolu. Kui vool liigub läbi juhtiva mähise ühes suunas, tekivad põhja- ja lõunapoolused.

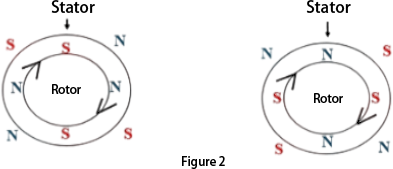
Kui hoovuse suunda muudetakse, pööratakse poolused ümber, nii et see, mis oli põhjapoolus, on nüüd lõunapoolus ja vastupidi. Joonis 1 annab selle toimimise põhimõttelise illustratsiooni. Joonisel 2 on vasakpoolne pilt olukord, kus rootorimagnetite poolused tõmbuvad staatori vastaspooluste poole. Mootori võlli külge kinnitatud rootori poolused pöörlevad, kuni need on joondatud staatori vastaspoolustega. Kui kõik jääks samaks, jääks rootor paigale.
Parempoolne pilt joonisel 2 näitab, kuidas staatori poolused on ümber pööratud. See juhtuks iga kord, kui rootori poolus jõuab staatori vastaspoolusele järele, pöörates voolu voolu läbi selle konkreetse staatori asukoha. Staatori pooluste pidev ümberpööramine loob olukorra, kus rootori püsimagneti poolused “ajavad taga” oma staatori vastandkohti, mille tulemuseks on rootori/mootori võlli pidev pöörlemine.
Staatori pooluste ümberpööramist tuntakse kommutatsioonina. Kommutatsiooni ametlik määratlus on "Roolivoolude mõju mootori õigetele faasidele, et tekitada mootori optimaalne pöördemoment ja mootori võlli pöörlemine". Kuidas suunatakse voolud õigel ajal võlli pöörlemise säilitamiseks?
Roolimist teostab inverter või ajam, mis toidab mootorit. Kui ajamit kasutatakse konkreetse mootoriga, tuvastatakse ajami tarkvaras nihkenurk koos muude asjadega, nagu mootori induktiivsus, takistus ja muud parameetrid. Mootoril kasutatav tagasisideseade (kooder, lahendaja jne) annab ajamile rootori võlli/magnetpooluse asukoha.
Kui rootori magnetpooluse asend ühtib nihkenurgaga, pöörab ajam ümber staatoripooli läbiva voolu, muutes seeläbi staatori poolust põhjast lõunasse ja lõunast põhja, nagu on näidatud joonisel 2. Sellest on näha, et pooluste joondamine peatab mootori võlli pöörlemise või järjestuse muutmine paneb võlli pöörlema ühes või teises suunas ning nende kiire muutmine võimaldab kiiret pöörlemist või vastupidi aeglase võlli pöörlemise korral.






